
















0411-84979887 / 84898221

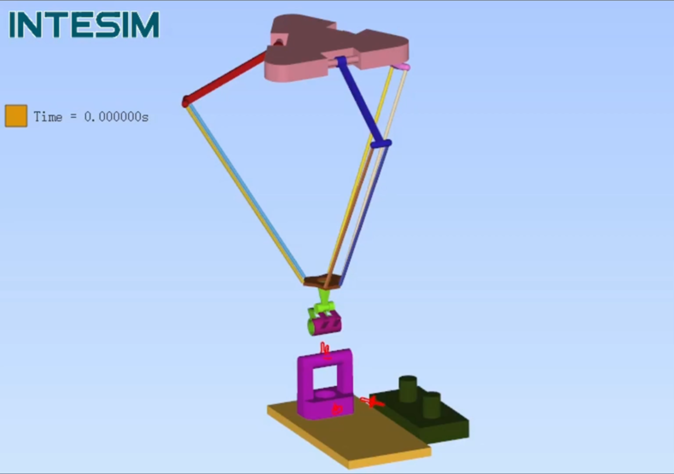
能够同时进行结构力学、热管理、电磁兼容与控制系统联合仿真

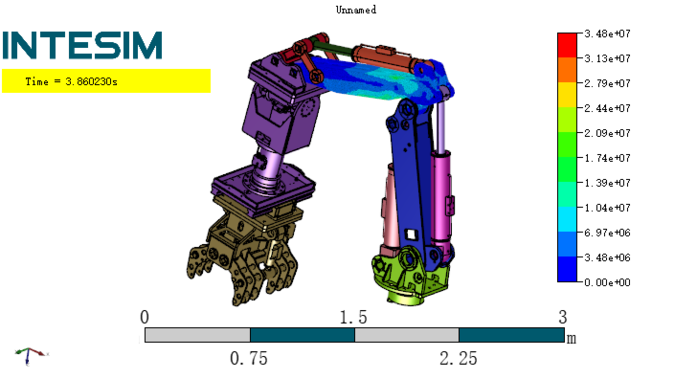
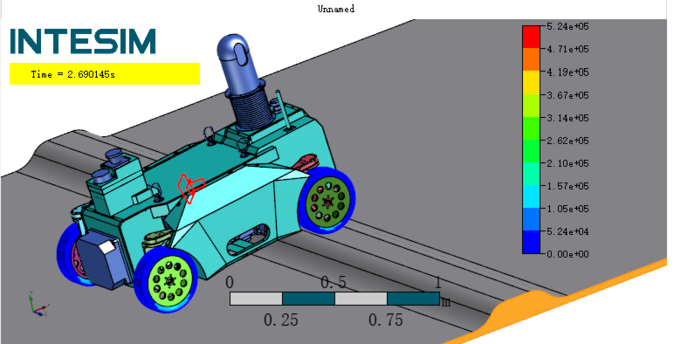
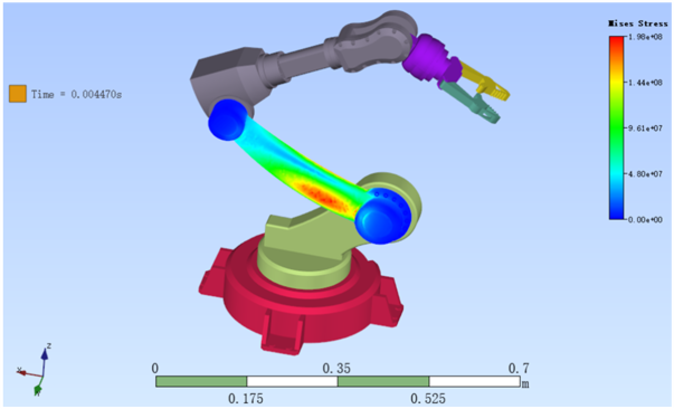
从传统的“零部件级”仿真上升到“系统级”仿真

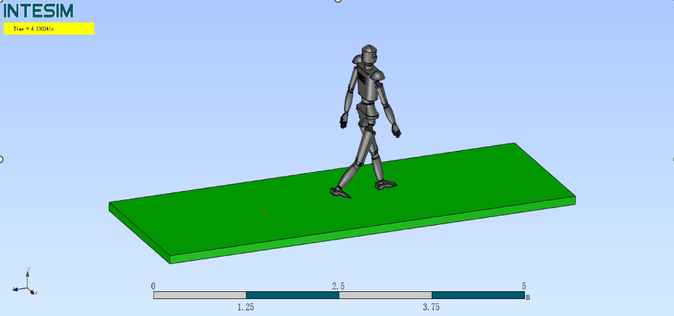
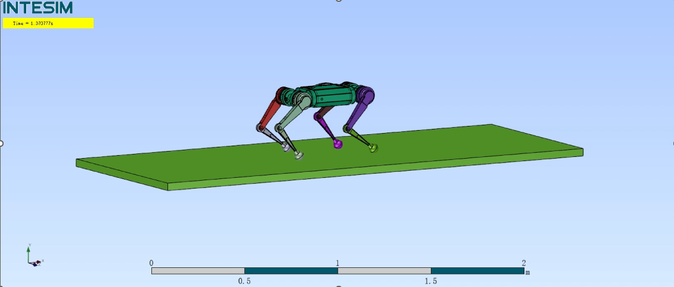
模拟柔性振动、复杂交互(地面、流体),适应极端工况

 解决方案客户收益解决方案客户收益解决方案客户收益解决方案客户收益解决方案客户收益
解决方案客户收益解决方案客户收益解决方案客户收益解决方案客户收益解决方案客户收益 扫码关注公众号
扫码关注公众号 扫码关注视频号
扫码关注视频号




Copyright © 2025 INTESIM英特工程仿真技术(大连)有限公司版权所有 辽ICP备10007071-2号 辽宁省大连高新技术产业园区火炬路56A号第21层(2101室)







 0411-84979887 / 84898221
0411-84979887 / 84898221
 marketing@intesim.com
marketing@intesim.com


